
El levantamiento de los Robots
Aquellos que nacen de la esperanza y constancia de sus investigadores para un dia tomar su lugar en la sociedad, primero como esclavos y despues como humanos.
“Los robots tomarán el lugar que los esclavos tenían en las civilizaciones antiguas. No hay razón para que esto no suceda en menos de un siglo, dejando a la humanidad libre para aspiraciones más elevadas”
Parafraseando a Isaac Asimov (Visiones de Robot), la idea de los robots como seres autónomos no es una idea nueva o moderna, el humano siempre ha soñado con máquinas con voluntad propia desde los inicios de la cilvilización, referencias a estas máquinas se encuentran en la mitologia griega, la civilización china o en los manuscritos del inventor Da Vinci. La pregunta es, ?¿Que tan cerca estamos de una manifestación autónoma de los robots?
La robótica ha sido constantemente de interés por la sociedad, a través de la ficción y la imaginación popular, sin embargo, tecnológicamente el desarrollo tradicional de la robótica se ha centrado en soluciones para la manufactura, con tareas repetitivas y sin algoritmos de inteligencia avanzados. La robótica como una manera de crear seres inteligentes no habia sido un objetivo primordial en la mayoría de paises, con la posible excepción de Japón (curiosamente Japón le daba más valor al Hardware que al Software). Ahora las cosas han cambiado, la robótica se ha manifestado como un tema de interés mundial y es en este punto de inflexión donde la carrera tecnológica se desata.
Una prueba contundente de este hecho son el número de Eventos mundiales de robótica, partiendo desde proyectos de colegios, universidades y finalmente en concursos de centros de investigación. Uno de estos eventos mundiales en investigación fue la serie del Darpa Grand Challenge (2004, 2005 y 2007), a manera de resumen, el Darpa Grand Challenge consistió de dotar de "inteligencia" a un automóvil para que maneje de manera autónoma, evitando obstáculos y buscando una ruta adecuada hacia la meta, valiéndose para este fin de sensores sofisticados como Láseres, Camaras, GPS, Encoders, etc. Muchas Universidades y sus centros de Investigación participaron, cada una con un diseño original y un algoritmo de inteligencia artificial propio. En el primer evento del 2004, ninguno de los robots completo la misión, lejos de declarar imposible tal hazaña (como algunos medios la calificaron), el evento se repitió en el 2005 donde 5 robots completaron la meta, con el robot "Stanley" de Stanford University como ganador. Posteriormente en el 2007, el equipo de Carnegie Mellon University, resultaron ganadores con el robot Tartan.

Stanley de stanford university
Este no es el único evento de Robótica a escala mundial que se ha realizado, después del desastre de Fukushima, se intentaron utilizar robots para controlar la situacion, sin embargo, esta fue una operación no exitosa. La agencia DARPA de Estados Unidos, lanza en 2013 un nuevo reto de robótica, Darpa Robotics Challenge, con las ambiciosas metas siguientes:
Subir escaleras, Manejar un carro, Coger una herramienta y perforar una pared, caminar sobre escombros, abrir puertas, retirar escombros, abrir valvulas y coger una manguera (Hola, Robot Humanoide). Todas las actividades son semi controladas, es decir los equipos pueden dar órdenes generales de acción del robot, pero finalmente el robot es el que decide cómo realizar la accion. ¿Suena imposible? Para ser honestos, los robots demoraban suficientes decenas de minutos en cada tarea que a veces parecía que no se movían, pero finalmente la tarea era completada, sin embargo la emoción ver actuar a estos autómatas infundian paciencia a los interesados. Seguro aún no estas convencido de que esto es posible, el equipo Ganador, un start-up Japonés (Schaft) nos dejo el siguiente video de su robot durante su fase de entrenamiento.
Aún falta la fase final de este evento, a realizarse a fin de año, la proyección por youtube es libre y será en vivo, asi que pueden ir haciendo planes para verla en casa. (Si logro estar presente en el evento, compartiré algunas fotos de los robots participantes)
Los principales problemas que se tienen con los robots de este tipo (Robots Humanoides), radican en los sistemas de control, algoritmos de inteligencia artificial, sensores y velocidad de computación. Por ahora tenemos robots con fuerza super humana pero con el cerebro de un neonato. Si los robots tienen problemas con cada uno de los temas anteriores, pueden imaginarse implementarlos todos juntos en el procesador del robot.
Partiendo con los sistemas de control, en el caso de robots humanoides, aún no contamos con métodos definitivos que nos permitan explotar su habilidad con una eficiencia cercana a la humana. Existen algoritmos de diversos tipos, algunos garantizan que el robot pueda caminar de manera estable, pero sin agilidad esperada por un humano, existen también otros algoritmos con gran agilidad y estabilidad que sin embargo son energéticamente ineficientes, y análogamente con otros casos el número de métodos se diversifica, claramente la caminata humana no es una tarea fácil para un robot, sobretodo si quieres conseguir agilidad y robustez (mantenerse estable incluso ante perturbaciones externas). Personalmente lo descubrí al hacer nuestro primer robot humanoide (mini robot quizá), Robbie, que utiliza el ZMP, un método que garantiza estabilidad pero carece de agilidad, que a pesar de ser un robot pequeno y facil de manejar, mis compañeros Santiago y Jorge junto conmigo pasamos muchas desveladas. Un ícono actual de robot humanoides es el trabajo de Boston Dynamics y su robot Petman, ojalá que pronto veamos la luz al final del túnel.
La inteligencia Artificial ha sido uno de los campos que más se ha desarrollado en estos años, esta área tiene posiblemente una aplicacion en la mayoría de actividades humanas que realizamos, desde navegar en google, calefacción de grandes edificios y decidir que rutas son las más baratas cuando viajamos en avión. En el caso particular de robots, IA le proporciona al robot una manera de interactuar con el entorno, entender la información que sus sensores le brindar y obtener inferencias. Por ejemplo, un robot "entiende" una imagen como una matriz de con valores de intensidad de los píxeles, ¿Cómo puede saber si un gato está echado sobre un sofá, observando esta matriz de números? Son cuestiones resueltas por algoritmos de aprendizaje. En el caso de la visión por computadora, existen esfuerzos para mejorar la velocidad de análisis del entorno, la segmentación de los objetos y obtener una hipótesis de lo que la imagen representa.
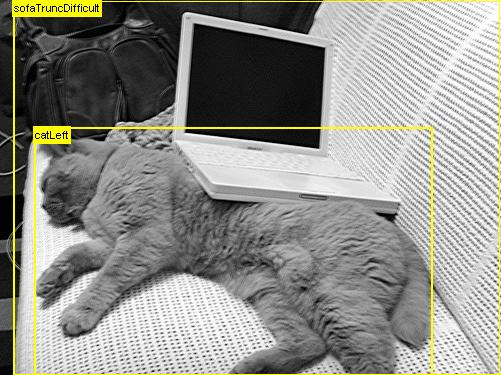
la computadora reconoce al gato y al sofa
Temas adicionales de Inteligencia artificial estan enfocados en permitir que el robot se localice dentro de un entorno, que pueda obtener conclusiones en base a la observación de los objetos a su alrededor, esta tarea es llamada localización y puede llegar a variar en complejidad dependiendo del entorno en el que el robot se encuentra. Esta tarea fue fundamental en el Darpa Grand Challenge, para que los carros autónomos puedan desplazarse por la carretera y tener una idea de su posicion con respecto al mapa y su entorno particular (Sí, es mas dificil que solo usar usar información del GPS).
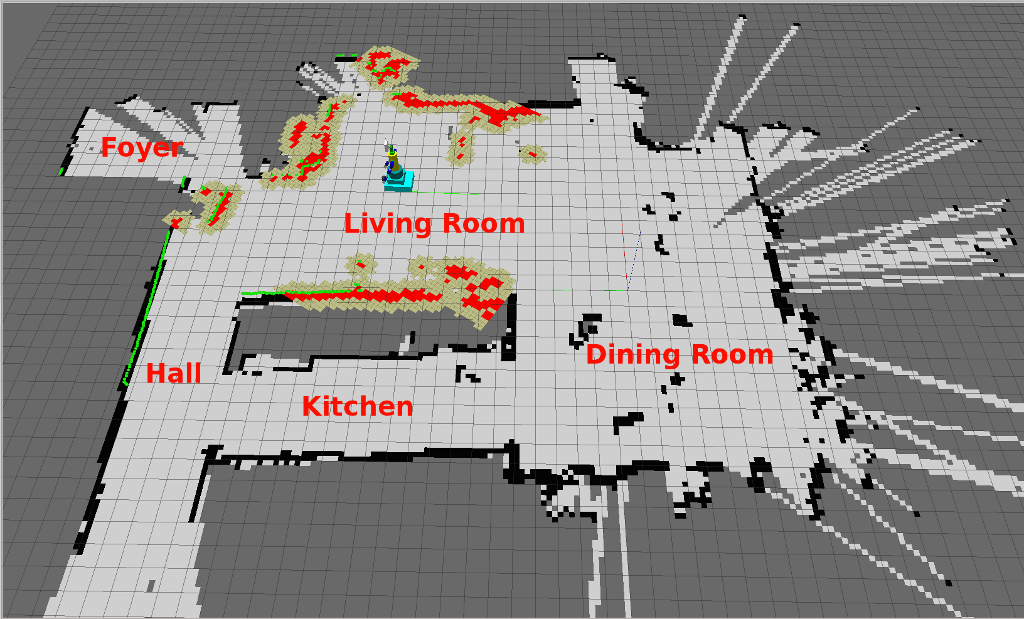
Lectura de los sensores y localizacion espacial
Finalmente los sensores y la velocidad de computación son elementos del hardware necesario de un robot, que aún necesitan ser mejorados para brindar más información y procesar algoritmos de manera más veloz y eficiente. La ley de Moore prevé un desarrollo tecnologico de estas tecnologias tambien.
Una vez afrontados los retos presentes en robótica, podremos tener maquinas más inteligentes, más ágiles y con mejores prestaciones que puedan interactuar con nosotros y ayudarnos en nuestras tareas del dia a dia. Claramente, aún queda un largo camino por recorrer.
Como nota al final, quería decir que es una gran para los investigadores e ingenieros del País y quizá de toda sudamérica de dar un paso al desarrollo tecnologico, con las nuevas tecnologías de impresoras 3D, microcomputadoras, herramientas de desarrollo e información de calidad online (un artículo vendrá acerca de las nuevas herramientas tecnológicas y la información libre en el mundo de la tecnología) podemos partir ahora hacia el desarrollo propio de nuestra tecnología de manera más sencilla. Pregunta al lector: ¿es tiempo de tratar de resolver problemas nacionales con nuestra propia tecnología? Recuerden que el evento del Darpa Grand Challenge fallό totalmente en el 2004, a veces fallar solo significa que estás aprendiendo.